VC 理论中 VC维 和 VC界 作为机器学习可学习性的最重要的理论基础,对于机器学习方法的研究和使用具有十分重要的指导意义。比如对于一个任务,我准备使用的机器学习方法是否合理、数据量至少需要多少,这些问题如何在进行实验之前就能被解答?答案就在本文中。
文章首发于我的博客,转载请保留链接 ;)
机器学习主要研究的是怎么去学习解决一个问题,这里面包含了一个隐含的前提条件:对于待学习的问题,学习方法必须是可行的。那么怎么去判定一个学习方法对于问题的可学习性呢?PCA Learning 就是关于机器学习可学习性的一个完善的解释理论。PAC learning,全称是 Probably approximately correct learning,中文直译叫 概率近似正确学习,有点拗口,解释下这个名称:
- 首先,Approximately Correct(近似正确)就是指学出的模型的误差比较小(误差被限制住),因为实现零误差(Absolutely Correct)是非常困难并且通常没有必要的,所以这里考虑的是 Approximately Correct;
- 其次,由于随机性的存在,我们只能从概率上保证 Approximately Correct 的可能性是很大的(存在一个概率下界)。
以上这就是 PAC Learning 的名称由来。Leslie Valiant 于1984年提出 PAC Learning,也主要因为该理论获得2010年图灵奖,可见该理论对机器学习的重要性。 PAC Learning 可以看做是机器学习的数学分析框架,它将计算复杂度理论引入机器学习,描述了机器学习的有限假设空间的可学习性,无限空间的VC维相关的可学习性等问题。
下面将从 可学习性、VC界、VC维 几个角度对 PAC Learning 理论进行介绍。在什么情况下 learning 是可行的?以机器学习实际应用的角度来看,需要具备以下两个条件,
- 模型不能过于复杂,数据量需要足够大,即模型的复杂程度不能远高于数据量的支撑
- 合适的最优化方法,即让 目标函数值接近0 的求参算法
这两个条件看起来是 “经验主义”,那有没有更加准确的数学程式化定义?
一、Hoeffding不等式
为了解答上面的问题,需要从 Hoeffding不等式 说起,Hoeffding不等式 是关于一组随机变量均值的概率不等式。 如果 X1,X2,⋯,Xn 为一组独立同分布的参数为 p 的伯努利分布随机变量,n为随机变量的个数。定义这组随机变量的均值为:
那么对于任意 δ>0, Hoeffding不等式 可以表示为
Hoeffding不等式 可以直接应用到一个 抽球颜色 的统计推断问题上:我们从罐子里抽球,希望估计罐子里红球和绿球的比例,
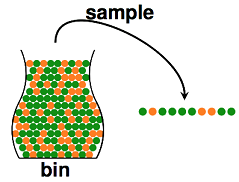
如果对 总览篇III 一文中涉及的统计推断方法还记得的话,知道这个问题根据 频率学派 和 贝叶斯学派 的差别有两个不同的答案,频率学派给出的答案就是 总体的期望 μ 就等于样本期望 ν,这里对两个学派就不再次进行解释了,只讨论频率学派给出的答案的准确性。直觉上,如果我们有更多的样本,即抽出更多的球,总体的期望 μ 确实越接近样本期望 ν;事实上,这里可以用 Hoeffding不等式 量化地表示接近情况,如果抽球样本数维 N,则如下:
二、Hoeffding不等式 应用到机器学习
将 Hoeffding不等式 应用到机器学习的问题上,机器学习的过程可以程式化表示为:通过算法 A,在机器学习方法的假设空间 H 中,根据样本集 D,选择最好的假设作为 g,选择标准是使 g 近似与理想的方案 f,其中,H 可以是一个函数(此时是非概率模型),也可以是一个分布(此时是概率模型),g 和 f 属于 H。类似于上面 “抽球” 的例子,可以通过样本集的经验损失(expirical loss ) ,即 in-sample error,来推测总体的期望损失(expected loss)
。对于假设空间 H 中一个任意的备选函数 h,基于 Hoeffding不等式,我们得到下面的式子:
那么对于整个假设空间 H,假设存在 M 个 h,则可以推导出下面的式子:
上面这个式子的含义很重要:在假设空间 H 中,设定一个较小的 ϵ 值,任意一个假设 h ,它的样本值和期望值之间的误差概率被一个只与 ϵ、样本数 N、假设数 M 相关的值约束住。
到这里,我们可以将最开始看起来 “经验主义” 地对 learning 可行的情况定义用上面的结论改造一下,如下所示:
1. 如果备选函数集(假设空间 H)的大小 |H|=M ,M 有限,训练数据量 N 足够大,则对于学习算法 A 选择的任意备选函数 h,都有
2. 如果 A 找到了一个备选函数,使得
,则有很大概率使
所以将 learning 可行性的问题用上面两个结论转换一下,问题变成了:
1. 我们能否保证 E-in(h) 与 E-out(h) 足够接近? 2. 我们能否使 E-in(h) 足够小?
其中对于第2点,能否使 E-in(h) 足够小这个问题通过合适的 “策略+算法” 可以达成,关于这一点在前面的文章中已经解释地比较详细了(具体可参考《总览篇 VI 策略-损失函数》、《总览篇 VIII 算法-梯度下降法及其变种》、《总览篇 IX 算法-牛顿法和拟牛顿法》这3篇文章);对于1点,我们将在下文继续分析。
三、成长函数(Growth Function)
继续上文进行分析,对于假设函数 h,我们如果能够保证 其在样本集中的损失值 与 其在总体数据集中的损失值 之间高误差的概率存在一个接近 0 的上界,那么当然就能够保证 E-in(h) 与 E-out(h) 足够接近。从上文的最后结论着手继续分析,
对于假设空间中的备选函数,假设数 M 通常是一个无穷大的数,而ϵ、样本数 N 是一个有限的数,看起来并不存在上界。所以一个直观的思路是,能否找到一个有限的因子来替代掉上面不等式上界(右边式子)中的 M。幸运的是,存在这个因子 m-H 恒满足下面的式子:
,且 m-H 是有限的,我们暂且称之为有效假设数(Effective Number of Hypotheses),D 是我们将 m-H 加入到上面的不等式替代大 M 的某种操作方法,我们先解决找到 m-H 的问题,再去解决 D 的问题。
为了找到 m-H 的值,继续进行分析:虽然假设空间中通常存在 M 个(M=无限)假设函数 h,但多个 h 之间并不是完全独立的,他们是有很大的同质性,也就是在 M 个假设中,可能有一些假设可以归为同一类。下面以二维线性假设空间为例,我们的算法要在二维空间挑选一条直线发成作为尽可能好的假设 g,用来划分一个点(N=1)的类别,虽然有无数条直线可供选择,但真正有判别意义的就两类:一类判别成正例,一类判别成反例。如下图所示,
即对于二维线性假设空间,当 N=1 时,,以此类推,可以用如下表格表示,
| N=1 | N=2 | N=3 | N=4 |
|---|---|---|---|
N 为1、2、3时,对应的有效假设数很好理解,但 N=4 时有效假设数是14而不是16,可以在纸上画一下 4 个点的两种不同的分布情况(凸轮廓和非凸轮廓)。根据以上的分析我们可以推测到一个结论,假设空间的大小 M 虽然是很大,但在样本集 D 上,有效假设数 m-H 是有限的,m-H 随着样本数 N 变化,有效假设数 m-H 和样本 N 关系又称之为成长函数(Growth Function),也就是样本损失值和总体期望损失值之间高误差的概率上确界(最小上界)。虽然上确界不能直观得出,但可以确定的是,
而且这个结论显然可以应用在任何二分类问题的假设空间,已知 m-H 必然存在一个上界是 2^N,则有下面的式子:
我们当然不会满足于成长函数是一个指数函数的结论,因为上式并不能保证概率上界(不等式的右边)是一个接近于0的值,所以我们需要进一步分析,尝试找到一个更小的上界。上面我们具体分析了二维线性假设空间下的情况,这里暂且不讨论二维假设空间中有效假设数的普遍结论,下文1.2节会详细讨论,下面我们来看更多其它情况下的案例。
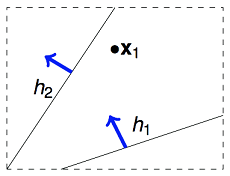
第一种是 “正例射线” 的假设空间,如下图1所示,

根据排列组合知识,可知 “正例射线” 的假设空间下的成长函数是
这个假设空间的有效假设数 m-H 是 N+1,是一个关于 N 的多项式,
OK,从上式的右边可以看到 N > 0 时,假设 D 是某种多项式操作方法,则上界(不等式右边)是一个随 N 递减的函数,当 N 取一个很大的值时,上界接近于0,对于这个问题,大功告成,是可学习的。
第二种是 “凸集” 的假设空间,如下图2所示,
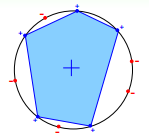
给定任意一种排列情况,总能找出一个凸集刚好包含了所有+1的点,并将-1的点排斥在外,所以很可惜,这种情况下的 m-H 就是 2^N,是不可学习的。
综合以上两种情况,我们发现,如果成长函数是指数函数,则随着 N 的增大,概率上界也急剧增加,所以我们希望成长函数是多项式,比如 “正例射线” 的问题,就是可学习的。那么是否有更多更普遍的成长函数是多项式的问题呢?幸运的是,答案又是肯定的。
四、打散(Shatter)、断点(Break Point)与 边界函数(Bound Function)
继续上文分析,为了找到更普遍的成长函数是多项式的问题,需要了解两个概念:打散(Shatter) 与 断点(Break Point)。
打散很简单,上文的 “凸集” 问题中 m-H=2^N,我们就可以称之为:N 个样本全都能被 H 打散(Shatter);而对于 “正例射线” 问题,当 N=1 时,m-H = 2 = 2^N,故称该问题中 1 个样本能被 H 打散。
断点与打散相关,不能被打散的样本数目就是断点,还是上面的 “正例射线” 问题,当 N>1 时,m-H 恒小于 2^N,故 N=2,3,4,… 都是断点。
总之,如果有 m-H(n) = 2^n,则称 n 个样本被 H 打散; m-H(n) < 2^n,则称 n 是 H 的一个断点,通常我们只关注最小断点值,称之为 k,因为大于 k 的点都是断点。接下来就是正餐,不同的假设空间 H 的断点 k 不一样大,我们定义一个上限函数 B(N,k),称之为 Bound Function,边界函数,即成长函数 m-H 的上界,表示在断点为 k 时成长函数 m-H 的上界,理解断点可能有点困难,可以把它看成一个假设空间 H 的一个固有属性。根据上文,当然有 B(N,k) 不大于 2^N,具体有以下情况,
- B(N,1)=1,因为 B(N,1) 表示对于 N 个样本,任意一个样本都不允许完全2分类,那么只能只有一种情况,加入任何第二种情况,总会有一个样本出现了两个分类;
- B(N,N)=2^N-1,因为对于 N 个样本,如果没有断点,B=2^N,而在 N 处刚好有断点,那么去掉某一种情况,就可以满足了;
- B(3,2)是多少,可以看下图3所示,
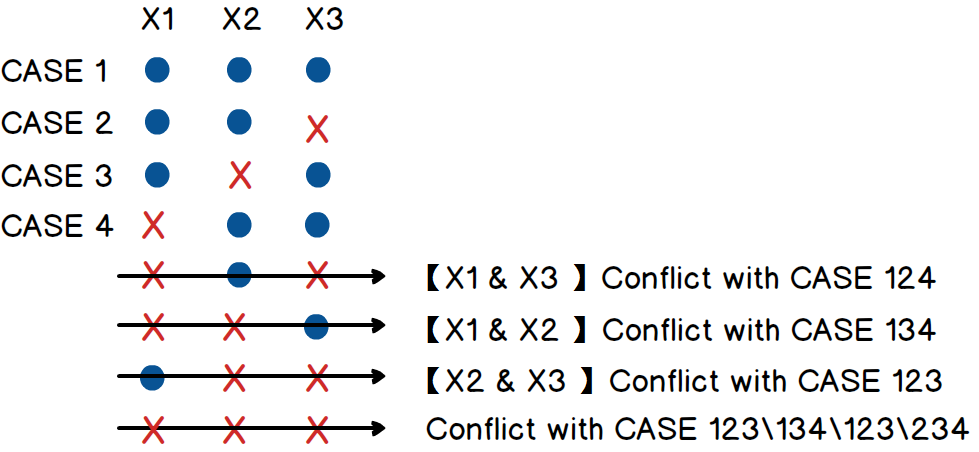
故,B(3,2)=4。以此类推,可以求得所有 B(N,k),但每个都这么算好麻烦,用计算机算比较快,但难道没有一个通用的表达式吗?看了一眼文章的进度条,看来答案是有的。
继续上文分析,根据1有 B(2,1)=1,根据2有 B(2,2)=3,根据3有B(3,2)=4。 B(3,2) 刚好等于 B(2,1)+B(2,2),即刚好满足 B(N,k) = B(N-1,k) + B(N-1,k-1),这不是偶然,我们可以大概推导一下(可以跳过,直接看结论): B(N,k) 比 B(N-1,k) 多了一个新样本,但断点没变,假设 B(N,k) 中有一部分(2α 个)是由 B(N-1,k) 的一部分(α 个)复制了一遍,然后分别加上新样本两类的情况;另一种是不能复制,只能加上新样本特定某一类别的那部分(β 个)。由于 B(N,k) 中存在 2α 个复制出的 case 保证了断点是 k,这意味着把新样本去掉后,原始 α 个 case 需要保证 N-1 个样本时断点是 k-1,否则 2α 个 N 样本的 case 的断点必然不是 k。根据以上推导可以得到
,根据以上递推公式,可以通过数学归纳法求 B(N,k) 的表达式,熟悉的高考题味道 :) ,推导过程省略,结论就是,
当 N » k时,有如下近似:
这个式子表示,如果假设空间存在有限的断点(Break Point),那么成长函数 m_H(N) 会被最高幂次为 k–1 的多项式上界 B(N,k) 给约束住。
五、VC界
为了确保可学习性,是要保证对于假设空间 H 中的任意的 h,都要有 Bad Case(样本损失值和总体期望损失值之间高误差
看起来将 N^(k+1) 替代上式的 m-H 就完成了,现在就来解决这个 D 问题,通过某种方法将 D 去掉,不能直接去掉 D 用 m-H 直接替代大 M 的主要问题在于:E-in 的可能取值是有限个的,但 E-out 的可能取值是无限的。怎么让不等式是针对有限的函数呢?可以通过将 E-out 替换为验证集 (verification set) 的 E-in’ 来解决这个问题。通过如下一系列复杂的证明,
终于将 D 给去掉,得到了我们要的 VC界 表达式,即最后一行公式。其实推理过程不用太在意,最重要的是最后的不等式,结合 “m-H(N) 最高幂次为 k–1 的多项式上界 B(N,k) 给约束住” 的结论,有:
以上式子意味着,随着 N 的逐渐增大,指数式的下降会比多项式的增长更快,N 足够大时,对 H 中的任意一个假设 h,E-in(h) 都将接近于E-out(h),这表示学习可行的第一个条件是有可能成立的。需要强调的是,以上所讲的只适用于二元分类问题,因为我们在推导 断点、成长函数 和 边界函数 时一直都基于二元分类这一前提。
六、VC维
上文的分析中可以看到,断点 k 是一个很重要的概念,而 VC维 就是跟 k 强相关的一个概念,VC维(VC dimension)的定义是 H 最多能够 打散 的点的数量,故如果用 d-vc 来表示 VC维,那么明显有:
联系上文,可以看到 VC界 是基于 VC维的。上面对二维线性假设空间分析,已知二维线性分类器不能打散 4 个及以上的样本,即 k=4,所以对于二维线性分类器,它的 VC维 就是3。一般而言,VC维 越大,表达能力就越强,但对数据、学习策略和算法的要求也越高。对于一个给定的分类器或者假设空间,应该如何确定 VC维 呢?一个不好的消息是,对于非线性分类器,VC维 非常难于计算,在学术研究领域,这仍然是一个有待回答的开放性问题。一个好消息是,对于线性分类器 VC维 是可以计算的,N 维实数空间中线性分类器和线性实函数的 VC维 是 N+1。
七、深度学习与VC维
多层神经网络作为非线性分类器,VC维 同样难以计算,但可以得到一个估计值。比如对于输出只有一维的深度神经网络,VC维 如下所示:
其中 l 是层数,d_i-1 是前一层的节点数,可以看到 VC维 与网络层数和节点数个数相关。如果对具体证明过程感兴趣,可以参考论文《VC Dimension of Multilayer Neural Networks, Range Queries》
举例来说,一个普通的三层全连接神经网络:input layer 是1000维,hidden layer 有1000个 nodes,output layer 为1个 node,则它的 VC维 大约为 O(1000*1000)。可以看到,神经网络的 VC维 相对较高,因而它的表达能力非常强,可以用来处理任何复杂的分类问题。根据上一节的结论,要充分训练该神经网络,所需样本量为10倍的 VC维,所以所需数据量是一个巨大的数字。如此大的训练数据量,在20世纪,训练出的复杂神经网络模型的泛化能力不是很好,容易过拟合。但现在为什么深度学习的表现越来越好。原因是多方面的,主要体现在:
- 通过修改神经网络模型的结构,以及提出新的 regularization 方法,使得神经网络模型的VC维相对减小了。例如卷积神经网络,通过修改模型结构(局部感受野和权值共享),减少了参数个数,降低了 VC维。2012年的AlexNet,8层网络,参数个数只有60M;而2014年的GoogLeNet,22层网络,参数个数只有7M。再例如dropout,drop connect,denosing 等 regularization 方法的提出,也一定程度上增加了神经网络的泛化能力;
- 训练数据变多了。随着互联网的越来越普及,相比于以前,训练数据的获取容易程度以及量和质都大大提升了。训练数据越多,E-in 越容易接近于 E-out。而且目前训练神经网络,还会用到很多 data augmentation 方法,例如在图像上,剪裁,平移,旋转,调亮度,调饱和度,调对比度等都使用上了;
- 除此外,pre-training 方法的提出,GPU 的利用,都促进了深度学习。
但即便这样,深度学习的 VC维 和VC界 依旧很大,其泛化控制方法依然没有强理论支撑。但是实践又一次次证明,深度学习是好用的。所以 VC维 对深度学习的指导意义,目前不好表述,不好表述就绕过它不表述,其中一个这么想的就是大牛 LeCun,他对 SVM 和 VC 理论没那么看重,《KDnuggets Exclusive: Interview with Yann LeCun, Deep Learning Expert, Director of Facebook AI Lab》 这篇对 LeCun 的访谈里 LeCun 表达出的观点很直接暴力:
- 承认 SVM 和 VC理论 很不错,但深度神经网络的 VC 维也是有限的,所以也是有 VC 界的,虽然 VC维 和 VC界 确实都有点大;
- SVM 只是一个第一层是度量支持向量和输入相似性、第二层是组合这些相似性的双层系统,其中第一层使用最简单的无监督学习方法,即直接使用训练样本来构建类别簇,有点简单了,虽然 SVM 的 VC理论能够以漂亮的数学方法进行容量控制(Capacity Control,指的是一种可学习性吧),容量控制能力虽然也重要,但没有表达能力重要,比如 SVM 不具备对图像的 “偏移、缩放、旋转、光照、背景杂乱” 等不变性,而这对于卷积神经网络来说很容易。
虽然有 “位置决定想法” 的嫌疑,但不得不说也有一定道理。但就现状而言,PAC 可行性分析 和 VC理论仍然是机器学习理论分析最重要的理论基础。
八、应用示例
回到最开始的问题,“对于一个任务,我准备使用的机器学习方法是否合理、数据量至少需要多少,这些问题如何在进行实验之前就能被解答?”。下面分别从 VC维 和 数据量 的选择分别说一下。
VC维的选择
将原 VC界 不等式稍作改写,那么在很高的概率下,模型的泛化误差和训练误差满足如下式子,
上式第3项表示了模型的复杂程度,可以看到是关于 VC维 的递增函数,所以 VC维 越大,两者差别越大。又由于我们知道,VC维 越大,模型表达能力越强,模型的训练误差越小。模型相关性能如图4所示,
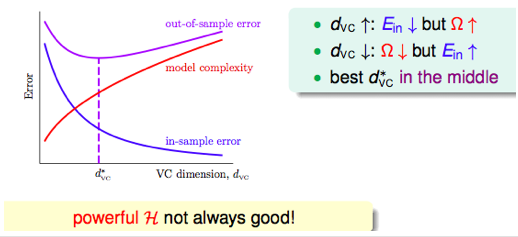
E-out - E-in 和 E-in 的下降速度在每个阶段都是不同的,因此我们需要寻找一个二者兼顾的 VC维,来保证 E-out 最小。
数据量的选择
面对一个这样的问题:针对2维数据,做一个2分类任务,泛化误差和训练误差的最大差距允许是 0.1,对应置信度是 90%,所用的模型是线性分类模型,需要多少数据?
首先,对于2维数据的线性二分类任务,d_vc=3,由于有 ε=0.1,δ=1-90%=0.1,然后经过下面一番估算,
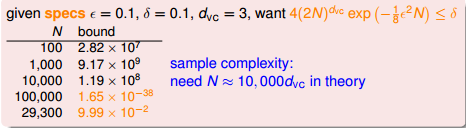
于是我们知道了,需要29300条训练数据作为训练集。从上面这个例子,可以看到 VC维 对于训练数据量的选取具有很直观的指导意义。
事实上,对于一般情况,VC维越大,需要更多的训练数据。理论上,数据规模需要满足 N=10000d_vc;但实际经验是只需要满足 N=10d_vc。造成理论值与实际值之差如此之大的最大原因是,VC界 为了保证其泛化正确性,推导过程中过于宽松了:
- 将 Hoeffding不等式 应用在 “任何数据分布、任何假设空间” 上;
- 有效假设数 m-H 设定成与 N 相关的函数,与具体数据无关,而事实上训练样本并不是任意 N 个;
- 同一个 VC维 的值可以各种各样的假设空间,而实际应用时假设空间是固定的一类函数;
- 推导出的 VC界 是最坏情况下的上界,即与学习策略和算法无关,而实际应用时我们会先验地去选择一个合适的策略和算法。
因为 VC界 对数据分布 D、目标函数 L、备选函数集 H、学习算法 A 都没有要求,它牺牲了部分精确性,换来了无所不包的一般性,这使得 VC界 具备一定程度上的指导性,毕竟实际应用时还有 ”具体问题具体分析“ 和 ”效果好就是好“ 两板斧。即便如此,就目前来说,VC维 & VC界 依然是分析机器学习模型的最重要的理论工具。
参考文献
- wiki: Hoeffding不等式
- Machine Learning - VC Dimension and Model Complexity
- PAC Learning and The VC Dimension
- blog: 机器学习物语(4):PAC Learnability
- csdn: 机器学习基础(林軒田)笔记之六
- csdn: 详解机器学习中的VC维
- csdn: NTU-Coursera机器学习:VC Bound和VC维度
- cnblogs: 解读机器学习基础概念:VC维的来龙去脉